ĐỘNG CƠ STEP
Động cơ step là gì ?
Động cơ bước ( Step Motor – Stepper Motor hay Stepping Motor ) là một thiết bị cơ điện, nó chuyển đổi điện năng thành cơ năng. Ngoài ra, nó là một động cơ điện không chổi than, đồng bộ, có thể chia một vòng quay đầy đủ thành một số bước mở rộng. Trục của động cơ quay qua một góc cố định cho mỗi xung rời rạc. Khi một chuỗi xung được áp dụng, nó sẽ được chuyển qua một góc nhất định. Góc mà trục động cơ bước quay cho mỗi xung được gọi là góc bước, thường được biểu thị bằng độ.
Cấu tạo
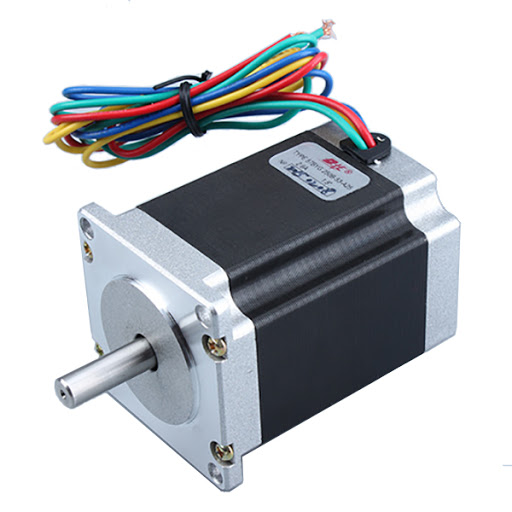
Rotor là một dãy các lá nam châm vĩnh cữu được xếp chồng lên nhau một cách cẩn thận. Trên các lá nam châm này lại chia thành các cặp cực xếp đối xứng nhau.
Stato được tạo bằng sắt từ được chia thành các rãnh để đặt cuộn dây.
Động cơ bước được điều khiển bởi bộ điều khiển bên ngoài. Động cơ bước và bộ điều khiển được thiết kế sao cho động cơ có thể giữ nguyên bất kỳ vị trí cố định nào cũng như quay đến một vị trí bất kỳ nào.
Nguyên lý hoạt động
Khác với các loại động cơ khác trên thị trường là quay theo cơ chế truyền thống, động cơ bước (step) quay theo từng bước một nên đảm bảo được độ chính xác về mặt điều khiển học.
Nguyên lý hoạt động của động cơ bước Step chủ yếu là nhờ các bộ chuyển mạch điện tử. Khi đó các mạch điện tử sẽ đưa các tín hiệu của lệnh điều khiển vào stato theo thứ tự và một tần số nhất định.
Tổng số lần chuyển mạch sẽ tương ứng với tổng số góc quay của rotor. Đồng thời chiều quay và tốc độ quay của rotor thì phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đồ của mạch.
Phân loại
Phân loại động cơ bước theo số pha
Loại 1: động cơ bước 2 pha là loại động cơ bước 4 dây, động cơ bước 6 dây hoặc động cơ bước 8 dây.
Loại 2: động cơ bước 3 pha là loại động cơ bước 3 dây hoặc động cơ bước 4 dây.
Loại 3: động cơ bước 5 pha là loại động cơ bước có 5 dây
Phân loại theo cực của động cơ bước
♦ Động cơ đơn cực
Dòng điện trong một động cơ đơn cực luôn chạy qua cuộn dây theo cùng một hướng. Điều này cho phép sử dụng mạch điều khiển đơn giản, nó tạo ra mô-men xoắn ít hơn động cơ lưỡng cực.
♦ Động cơ lưỡng cực
Dòng điện trong một động cơ lưỡng cực có thể chạy qua cuộn dây theo một trong hai hướng. Trong khi điều này đòi hỏi một mạch điều khiển phức tạp hơn động cơ đơn cực, nó tạo ra nhiều mô-men xoắn hơn.
Phân loại động cơ bước theo Rotor
Động cơ bước nam châm vĩnh cửu ( Permanent magnet stepper ) :
Động cơ nam châm vĩnh cửu sử dụng một nam châm vĩnh cửu (PM) trong rotor và hoạt động dựa trên lực hút hoặc lực đẩy giữa rotor PM và nam châm điện stator.
Động cơ bước biến đổi điện trở ( Variable Reluctance Stepper Motor ) :
Động cơ bước biến đổi điện trở (VR) có một rotor sắt trơn và hoạt động dựa trên nguyên tắc miễn cưỡng tối thiểu xảy ra với khe hở tối thiểu, do đó các điểm rotor bị hút về phía cực nam châm của stator.
Động cơ bước đồng bộ lai ( Hybrid Synchronous Stepper Motor ):
Động cơ bước lai (HB) được đặt tên bởi vì chúng sử dụng kết hợp các kỹ thuật nam châm vĩnh cửu (PM) và biến đổi điện trở (VR) để đạt được công suất tối đa trong kích thước nhỏ gọn.
Các phương pháp điều khiển
Điều khiển dạng sóng ( Wave Drive )
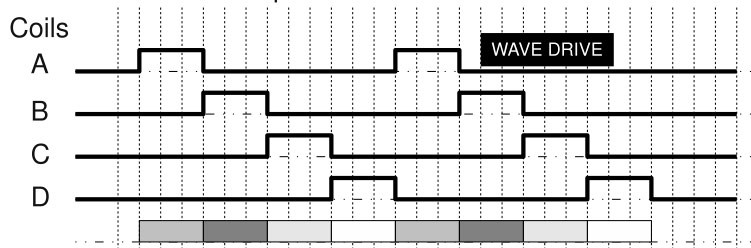
Đây là cách cơ bản nhất để điều khiển một động cơ bước và nó không được sử dụng nhiều nhưng vẫn đáng để hiểu về việc điều khiển động cơ bước. Trong phương pháp này, mỗi pha hoặc stato cạnh nhau sẽ được kích hoạt lần lượt bằng cách sử dụng một mạch đặc biệt. Điều này từ hóa và khử từ hóa stato dẫn đến chuyển động của rôto một bước.
Điều khiển chạy đủ bước ( Full Step Drive )
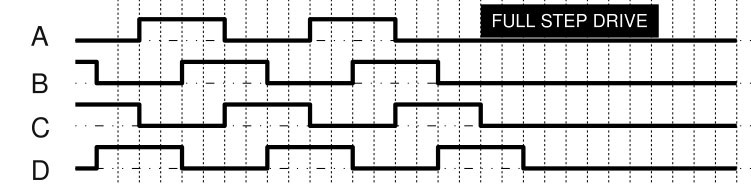
Trong phương pháp này thay vì kích hoạt các stator một lần, hai stator được kích hoạt với một khoảng thời gian ngắn giữa chúng. Trong chế độ này, bất kỳ hai stator sẽ được kích hoạt. Điều này có nghĩa là stator thứ nhất bật ON và stator thứ hai sẽ ON sau một khoảng thời gian ngắn trong khi stator thứ nhất vẫn ON. Phương pháp này dẫn đến mô-men xoắn cao và cho phép điều khiển động cơ tải cao.
Điều khiển chạy bước nhỏ ( MicroStepping Drive )

Đây là phương pháp điều khiển được sử dụng phổ biến nhất vì tính chính xác của nó. Mạch điều khiển cung cấp dòng bước biến đổi cho cuộn dây stato ở dạng sóng hình sin. Những bước nhỏ xíu này hiện nay giúp tăng cường độ chính xác của từng bước một. Phương pháp này được sử dụng rộng rãi vì nó cung cấp độ chính xác cao và giảm tiếng ồn hoạt động ở mức độ lớn.
Phương pháp điều khiển hiện nay
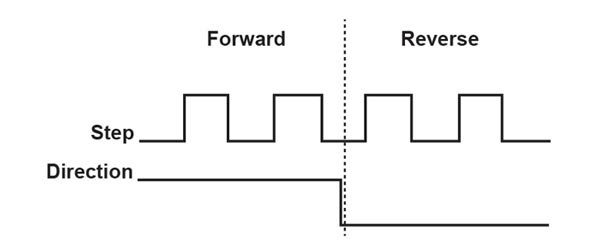
Ngày nay việc điều khiển khiển động cơ step khá đơn giản do sự phát triển của các bộ điều khiển (Driver) cho động cơ step. Khi điều khiển qua driver ta sử dụng phương pháp phổ biến nhất đó là xuất dung PTO (Pulse Train Output). Trong phương pháp này ta sử dụng 2 tín hiệu : Xung (điều khiển tốc độ và tọa độ) và Hướng ( điều khiển chiều quay của động cơ )

Phía dưới đây là video mô tả chi tiết nguyên lý hoạt động của động cơ step
Đặc điểm của động cơ step
- Động cơ bước có thể sử dụng trong hệ thống điều khiển vòng hở đơn giản, hoặc vòng kín. Tuy nhiên khi sử dụng động cơ bước trong hệ điều khiển vòng hở khi quá tải. Tất cá các giá trị của động cơ đều bị mất và hệ thống cần nhận diện lại.
- Động cơ bước hoạt động dưới tác dụng của các xung rời rạc và kế tiếp nhau. Khi có dòng điện hay điện áp đặt vào cuộn dây phần ứng của động cơ. Bước làm cho roto của động cơ quay một góc nhất định gọi là bước của động cơ.
- Góc bước là góc quay của trục động cơ tương ứng với một xung điều khiển. Góc bước được xác định dựa vào cấu trúc của động cơ bước. Và phương pháp điều khiển động cơ bước.
- Tính năng mở máy của động cơ được đặc trưng. Bởi tần số xung cực đại có thể mở máy mà không làm cho roto mất đồng bộ.
- Chiều quay động cơ bước không phụ thuộc vào chiều dòng điện. Mà phụ thuộc vào thứ tự cấp xung cho các cuộn dây.
TRUNG TÂM ĐÀO TẠO PLC ATVN
- Chuyên: Đào tạo lập trình PLC, thiết kế tủ điện, autocad, Robot
- Hotline: 032.868.3266 (zalo) – 0965.682.689 (zalo)
- Địa chỉ: 105 Lai Xá, Kim Chung, Hoài Đức, Hà Nội
- Email: tudonghoaatvn@gmail.com